
Podobné články
SMART MACHINES - chytré stroje?
Novinky
Krokové motory jsou často nejvhodnějším řešením tam, kde je potřeba polohovat jelikož jejich provoz je jednoduchý a náklady na pořízení a provoz jsou velice nízké. Krokové motory však zdaleka nejsou všelékem.
Krokové motory jsou zařízení, která se do určité polohy nastavují sama, a jejich používání je tedy velice prosté. K tomu, aby zůstaly v určité pozici, není zapotřebí žádný kódovač ani regulační smyčku se servopohonem. Jejich hlavními nevýhodami jsou vibrace a hluk při provozu, společně s omezeným rozsahem rychlosti. Jejich použití zároveň vyžaduje externí „komunikaci" využívající vícefázové řízení nebo zesilovač.
Pojmem vícefázová zařízení se rozumí, že jsou krokové motory vybaveny dvěma či více cívkami, které musejí být řízeny elektronicky, aby byly uvedeny do chodu (většina těchto motorů má dvě cívky, neboli fáze, existují ovšem krokové motory se třemi a pěti cívkami).
Zesilovač převádí nefázované řídící informace jako např. pulzní a směrové signály na sadu uspořádaných napěťových příkazů pro každou cívku v motoru. Zesilovače zvládají několik různých technik fázování, mezi něž patří ovládání např. po celých krocích, půlkrocích a mikrokrocích.
Tyto techniky odpovídají počtu výkonových úrovní, které během elektrického cyklu působí na každou cívku.
Pohon po celých krocích využívá „celopozitivní", resp. „celonegativní " techniku; pohon po půlkrocích dokáže rozdělit proud do tří úrovní (celopozitivní, nulová, celonegativní). Obě techniky však mají na svědomí, že se motor pohybuje poněkud hrubě (při tvarovém kmitu).
Pohon po mikrokrocích dokáže naopak vytvářet víceméně sinusoidní signál. Čím více se tvarový kmit podobá sinusoidě, tím hladší a přesnější je úroveň ovládání.
Ve všech třech případech se motor pohybuje kupředu nebo dozadu tím, že jsou střídány elektrické fáze. „Celý" krok znamená jedno pootočení o 90 elektrických stupňů. Krokové motory se většinou vyrábějí ve verzi, kde jeden celý elektrický krok (při 90 elektrických stupních) odpovídá 1,8 mechanického stupně.
To znamená, že pro jedno celé mechanické otočení „ujdou" motory s 1,8stupňovým krokem 200 kroků. Pokud se používá systém s mikrokroky, nastavovací rozlišení (nikoli však přesnost – viz následující odstavec) lze vypočítat tak, že vynásobíme počet mikrokroků potřebných na celý krok počtem stupňů na celkový počet kroků potřebných k jednomu celému otočení.
Pokud tedy máte pohon s 64 mikrokroky na jeden celý krok s 1,8stupňovým motorem s 200 celými kroky potřebnými na jedno celé otočení motoru, disponujete 64 x 200, tj. 12.800 různými nastavitelnými polohami, do kterých se může motor natočit. Toto číslo je „rozlišení", ve kterém můžete nastavovat pozici motoru. Mějte přitom na paměti, že v případě krokových motorů nejsou přesnost a rozlišení zcela tím samým. To je dáno tím, že mechanická odezva krokového motoru na výstupní signály zesilovače není dokonale lineární, přičemž ani magnetické upnutí zajišťující kroutící moment není dokonale nepoddajné.
Rozdíly sice bývají většinou velice malé, v případě některých využití však mohou být významné. Principy motoru
Stejně jako většina motorů, také krokový motor může být přirovnán k rotujícímu tyčovému magnetu, na který působí magnetické pole.
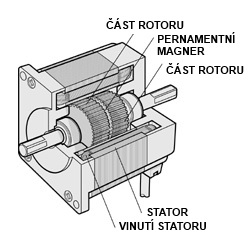
Rotor má v sobě trvalé magnety, na které ve chvíli, kdy jsou cívky pod proudem (magnetizovány), působí magnetické pole statoru (stator je vnější část motoru, která se nehýbe).
Když jsou cívky statoru excitované, dochází ke vzniku zhruba sinusoidního silového „údolí", které způsobuje, že se krokový motor usadí v přednastavené pozici. Silové údolí je jednoduše kroutící moment rotoru při jeho otáčení v 360° elektrickém cyklu.
Pokaždé, kdy je křivka horizontální, nedochází k žádnému kroutícímu momentu, zatímco ve chvílích, kdy je křivka nejstrmější, je kroutící moment největší. Aby elektronický ovladač vytvořil pohyb, posouvá toto údolí buď kupředu nebo dozadu (v závislosti na zvoleném směru pohybu) tím, že reguluje fázování cívky.
V důsledku toho pak motor „padá" dopředu nebo dozadu. Představte si kutálející míč, který se usazuje na dno žlabu nebo surfaře, který se veze na vlně. Když si představíte tyto analogie, pomůže vám to pochopit hned několik aspektů fungování krokového motoru.
Když si představíme údolí kroutícího momentu jako vlnu, přirovnání k surfaři pak vysvětluje občasnou tendenci krokového motoru „vypadnout z rozjetého vlaku" a dostat se do nastavené pozice vysokou rychlostí nebo zrychlením. To, k čemu ve skutečnosti dochází, je to, že motor a jeho zatížení nedokáží držet krok s požadavkem na pohyb a „rozejdou se", čili ztrácí „krok" neboli synchronicitu s přednastaveným profilem chodu.
Stejně jako surfař, kterého vymrštila vlna do vzduchu, ani u krokového motoru není možné tento stav „za letu" napravit - profil mezitím totiž postoupí ještě dál, zatímco krokový motor se náhle zastaví.
Metafora s údolím pomáhá vysvětlit také další jev, konkrétně skutečnost, že se krokový motor pod vlivem vnější síly nezastaví v přednastavené pozici. K tomu dochází z toho důvodu, že se vnější síla snaží tlačit osu „do kopce", ať už na jednu či na druhou stranu, takže se motor nebude nacházet v teoreticky předpokládané pozici (tj. na samém dně údolí).
Dalšímu problému, který vyplývá z „usazování" otevřené smyčky v údolí, se říká nestabilita středního rozsahu. Příznakem tohoto chování je, že dochází k poklesu dostupného kroutícího momentu při konkrétní frekvenci, která se pohybuje kdesi ve „středním rozsahu" celkové rychlosti krokování.
Nestabilita je výsledkem vzájemného působení frekvence vlastní rezonance motoru při jeho „stoupání" a „klesání" kolem cílové pozice v údolí (velice podobná rezonanční pružině) a regulačního obvodu elektrického proudu. V nestabilním bodě může dojít k tomu, že dojde k nadměrnému fázovému zpoždění účinného proudu v každé cívce, čímž následně dojde ke snížení nebo dokonce reverzování tlumících účinků v systému, který je určen k vyvažování tendence motoru rezonovat.
Plynulost a stability pohybu je nejhorší u celokrokových motorů a nejlepší u motorů využívajících mikrokroky, přestože i v případě mikrokroků může občas dojít k"drnčení". Toto riziko lze dále snížit tím, že budete používat motor se zkosenou konstrukcí rotoru či nejmodernější regulační techniku.
Krokové motory jsou často nejvhodnějším řešením tam, kde je potřeba polohovat jelikož jejich provoz je jednoduchý a náklady na pořízení a provoz jsou velice nízké. Krokové motory však zdaleka nejsou všelékem.
Krokové motory jsou zařízení, která se do určité polohy nastavují sama, a jejich používání je tedy velice prosté. K tomu, aby zůstaly v určité pozici, není zapotřebí žádný kódovač ani regulační smyčku se servopohonem. Jejich hlavními nevýhodami jsou vibrace a hluk při provozu, společně s omezeným rozsahem rychlosti. Jejich použití zároveň vyžaduje externí „komunikaci" využívající vícefázový pohon nebo zesilovač.
Pojmem vícefázová zařízení se rozumí, že jsou krokové motory vybaveny dvěma či více cívkami, které musejí být řízeny elektronickým pohonem, aby byly uvedeny do chodu (většina těchto motorů má dvě cívky, neboli fáze, existují ovšem krokové motory se třemi a pěti cívkami).
Zesilovač převádí nefázované řídící informace jako např. pulzní a směrové signály na sadu uspořádaných napěťových příkazů pro každou cívku v motoru. Zesilovače zvládají několik různých technik fázování, mezi něž patří ovládání např. po celých krocích, půlkrocích a mikrokrocích
Tyto techniky odpovídají počtu výkonových úrovní, které během elektrického cyklu působí na každou cívku.
Pohon po celých krocích využívá „celopozitivní", resp. „celonegativní " techniku; pohon po půlkrocích dokáže rozdělit proud do tří úrovní (celopozitivní, nulová, celonegativní). Obě techniky však mají na svědomí, že se motor pohybuje poněkud hrubě (při tvarovém kmitu).
Pohon po mikrokrocích dokáže naopak vytvářet víceméně sinusoidní signál. Čím více se tvarový kmit podobá sinusoidě, tím hladší a přesnější je úroveň ovládání.
Ve všech třech případech se motor pohybuje kupředu nebo dozadu tím, že jsou střídány elektrické fáze. „Celý" krok znamená jedno pootočení o 90 elektrických stupňů. Krokové motory se většinou vyrábějí ve verzi, kde jeden celý elektrický krok (při 90 elektrických stupních) odpovídá 1,8 mechanického stupně.
To znamená, že pro jedno celé mechanické otočení „ujdou" motory s 1,8stupňovým krokem 200 kroků. Pokud se používá systém s mikrokroky, nastavovací rozlišení (nikoli však přesnost – viz následující odstavec) lze vypočítat tak, že vynásobíme počet mikrokroků potřebných na celý krok počtem stupňů na celkový počet kroků potřebných k jednomu celému otočení.
Pokud tedy máte pohon s 64 mikrokroky na jeden celý krok s 1,8stupňovým motorem s 200 celými kroky potřebnými na jedno celé otočení motoru, disponujete 64 x 200, tj. 12.800 různými nastavitelnými polohami, do kterých se může motor natočit. Toto číslo je „rozlišení", ve kterém můžete nastavovat pozici motoru. Mějte přitom na paměti, že v případě krokových motorů nejsou přesnost a rozlišení zcela tím samým. To je dáno tím, že mechanická odezva krokového motoru na výstupní signály zesilovače není dokonale lineární, přičemž ani magnetické upnutí zajišťující kroutící moment není dokonale nepoddajné.
Rozdíly sice bývají většinou velice malé, v případě některých využití však mohou být významné.
Stejně jako většina motorů, také krokový motor může být přirovnán k rotujícímu tyčovému magnetu, na který působí magnetické pole.
Rotor má v sobě trvalé magnety, na které ve chvíli, kdy jsou cívky pod proudem (magnetizovány), působí magnetické pole statoru (stator je vnější část motoru, která se nehýbe).
Když jsou cívky statoru excitované, dochází ke vzniku zhruba sinusoidního silového „údolí", které způsobuje, že se krokový motor usadí v přednastavené pozici. Silové údolí je jednoduše kroutící moment rotoru při jeho otáčení v 360° elektrickém cyklu.
Pokaždé, kdy je křivka horizontální, nedochází k žádnému kroutícímu momentu, zatímco ve chvílích, kdy je křivka nejstrmější, je kroutící moment největší. Aby elektronický ovladač vytvořil pohyb, posouvá toto údolí buď kupředu nebo dozadu (v závislosti na zvoleném směru pohybu) tím, že reguluje fázování cívky.
V důsledku toho pak motor „padá" dopředu nebo dozadu. Představte si kutálející míč, který se usazuje na dno žlabu nebo surfaře, který se veze na vlně. Když si představíte tyto analogie, pomůže vám to pochopit hned několik aspektů fungování krokového motoru.

Když si představíme údolí kroutícího momentu jako vlnu, přirovnání k surfaři pak vysvětluje občasnou tendenci krokového motoru „vypadnout z rozjetého vlaku" a dostat se do nastavené pozice vysokou rychlostí nebo zrychlením. To, k čemu ve skutečnosti dochází, je to, že motor a jeho zatížení nedokáží držet krok s požadavkem na pohyb a „rozejdou se", čili ztrácí „krok" neboli synchronicitu s přednastaveným profilem chodu.
Stejně jako surfař, kterého vymrštila vlna do vzduchu, ani u krokového motoru není možné tento stav „za letu" napravit - profil mezitím totiž postoupí ještě dál, zatímco krokový motor se náhle zastaví.
Metafora s údolím pomáhá vysvětlit také další jev, konkrétně skutečnost, že se krokový motor pod vlivem vnější síly nezastaví v přednastavené pozici. K tomu dochází z toho důvodu, že se vnější síla snaží tlačit osu „do kopce", ať už na jednu či na druhou stranu, takže se motor nebude nacházet v teoreticky předpokládané pozici (tj. na samém dně údolí).
Dalšímu problému, který vyplývá z „usazování" otevřené smyčky v údolí, se říká nestabilita středního rozsahu. Příznakem tohoto chování je, že dochází k poklesu dostupného kroutícího momentu při konkrétní frekvenci, která se pohybuje kdesi ve „středním rozsahu" celkové rychlosti krokování.
Nestabilita je výsledkem vzájemného působení frekvence vlastní rezonance motoru při jeho „stoupání" a „klesání" kolem cílové pozice v údolí (velice podobná rezonanční pružině) a regulačního obvodu elektrického proudu. V nestabilním bodě může dojít k tomu, že dojde k nadměrnému fázovému zpoždění účinného proudu v každé cívce, čímž následně dojde ke snížení nebo dokonce reverzování tlumících účinků v systému, který je určen k vyvažování tendence motoru rezonovat.
Plynulost a stability pohybu je nejhorší u celokrokových motorů a nejlepší u motorů využívajících mikrokroky, přestože i v případě mikrokroků může občas dojít k"drnčení". Toto riziko lze dále snížit tím, že budete používat motor se zkosenou konstrukcí rotoru či nejmodernější regulační techniku.
zdroj: engineerlive.com