
Podobné články
Výhody pneumatiky

Novinky
Roboty automatizují procesy jak na vysokoobjemových výrobních linkách, tak i v případě drobných úkonů. Nabízíme vám srovnání kartezských robotů s dalšími dvěma typy.
Využívání kartezských a šestiosých robotů je na vzestupu, a to samé se týká robotických ramen SCARA (selective-compliance-articulated robot arms – tedy libovolně polohovatelná robotická ramena). Automatizují jednotlivé úkony a zkracují tím dobu trvání celých cyklů, zvyšují výrobní kapacitu a pomáhají eliminovat výskyt poruch. Díky svým ovládacím prvkům jsou tyto roboty uživatelsky přívětivější než kdy byly, přičemž svými nároky na dodatečné programování kladou na uživatele jen minimální nároky. V některých případech mohou dokonce koncoví uživatelé a OEM výrobci roboty konfigurovat a/nebo vybírat si mezi jejich funkcemi pomocí online nástrojů.
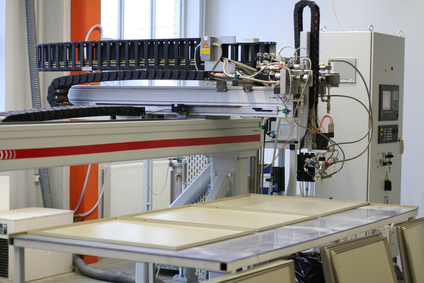
Kartezské roboty, někdy též zvané portálové, jsou mechatronická zařízení, která pro nastavení nástroje do určité pozice využívají elektromotory a lineární aktuátory. Pohybují se lineárně po osách X, Y a Z. Kovová konstrukce slouží jako rám, který stanovuje trasy jednotlivých os a zároveň funguje jako podpora pro zdvih při zatížení. V některých případech, jako např. při obrábění součástek s nízkou toleranci odchylky, je nezbytná plná podpora kotvící osy, obvykle osy X. Na druhé straně existují využití, jako v případě vyzvedávání láhví z pásu, kdy požadavky na přesnost nejsou tak vysoké a u základní nosné konstrukce stačí, aby kotvící osu podporovala pouze v souladu s doporučeními uváděnými výrobcem aktuátorů. Kartezské roboty se pochopitelně mohou pohybovat pouze v rozmezí daném nosnou konstrukcí, ta však může být namontována horizontálně či vertikálně, v některý případech portálových konfigurací se lze také setkat se závěsným uchycením.
Oproti tomu se robotická ramena SCARA a šestiosé roboty montují téměř vždy na podstavec. Stejně jako kartezské roboty, také ramena SCARA se pohybují v rovinách X, Y a Z, na konci osy Z ovšem navíc disponují rotační osou (théta). Díky tomu jsou ramena SCARA vhodná pro účely vertikálních montážních úkonů, jakou je vkládání závlaček do otvorů bez nutnosti jejich vázání. Tato ramena jsou ve své podstatě páky, což omezuje jejich dosah: klouby jsou působištěm zatížení, která pro to, aby dokázala manipulovat s břemenem i při maximálním natažení, potřebují masivní ložiska a motory o velkém točivém momentu.
Šestiosé roboty se mohou pohybovat dopředu a zpět, nahoru a dolů a dokáží také vybočovat, naklánět se podélně nebo se protáčet a nabízejí tak více možností pohybu než ramena SCARA. To je vhodné především v případě náročných pohybů, které mají simulovat pohyb lidské paže – např. „shýbání" se za účelem zdvihnout součástku a umístit ji na dopravník. Díky širšímu rejstříku pohybů také mohou šestiosé roboty vykonat větší objem práce než ramena SCARA. Šestiosé roboty jsou často využívány při svařování, paletizaci nebo obsluze strojů. Naprogramování jejich pohybů ve třech dimenzích je poměrně komplikované, takže software zpravidla zobrazuje jejich pohyb pomocí obecných souřadnic, které jsou dány původním usazením na podstavci a vycházejí z první společné osy.